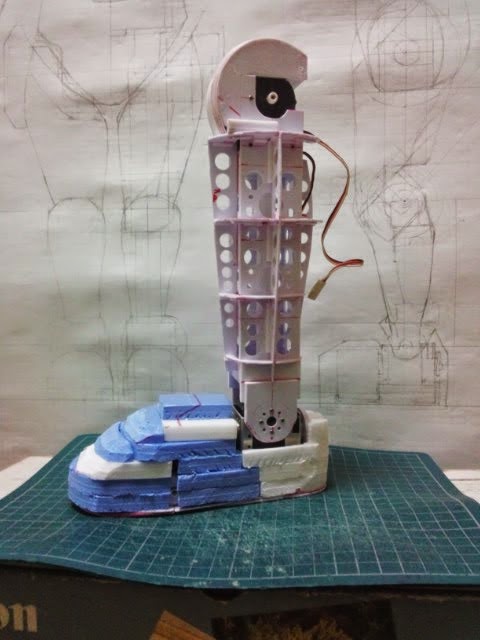
人型ロボットをharibote01として作っている。脚の外装を貼っている所。前日貼ったのを直したけどやっぱりズレてしまった。他の所は段差が出来てしまうし上手く行かない。脚の裏側はまだ貼れてない。
PoppyはMX-28とかMX-64を使っているみたい。部品から推測すると3Kgぐらいの重量だと思う。MX-28のトルクは約30Kgなので動きは普通かな?バッテリーは頭の中に収まっているんじゃないか?サーボを繋ぐフレームを3Dプリンターで作ると組み立てる手間が減る。
ロボットの重量をKg換算して10倍した値のトルクのサーボを使っている場合が多い。ロボットの高さはあまり関係ない。