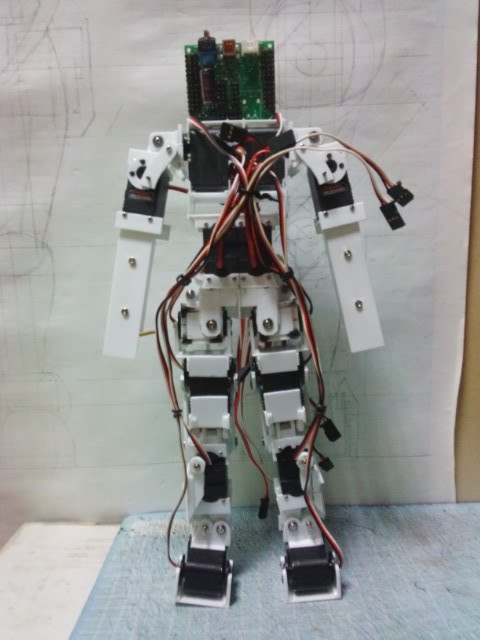
実験用ロボットを作っている。
以前失敗したRCサーボ機体のリベンジ。6Vまで対応のRCサーボだけど充電池6本で8V近くの電圧でも動いた。20個繋ぐと動作中に5V以下まで下がってしまう事がある。16個だと5V以上を保っていた。RCサーボで違うと思うけど、充電池6本で使える事が分かった。とは言っても電池の減りが早くて使い所が難しい。
KONDOサーボの設定を変える為のアダプターを引っ張り出したけどソフトが見つからない。
2017年3月30日木曜日
2017年3月29日水曜日
2017年3月28日火曜日

2017年3月27日月曜日

2017年3月26日日曜日

2017年3月25日土曜日

2017年3月24日金曜日

2017年3月23日木曜日

2017年3月22日水曜日

2017年3月21日火曜日

2017年3月20日月曜日

2017年3月19日日曜日

2017年3月18日土曜日

2017年3月17日金曜日

2017年3月16日木曜日

2017年3月15日水曜日

2017年3月14日火曜日

2017年3月13日月曜日

2017年3月12日日曜日

2017年3月11日土曜日

2017年3月10日金曜日

2017年3月9日木曜日

2017年3月8日水曜日

2017年3月7日火曜日

2017年3月6日月曜日

2017年3月5日日曜日

2017年3月4日土曜日
2017年3月3日金曜日

2017年3月2日木曜日


登録:
投稿 (Atom)