skip to main
|
skip to sidebar
space
2020年3月31日火曜日
実験用ロボット
実験用ロボットを作っている。
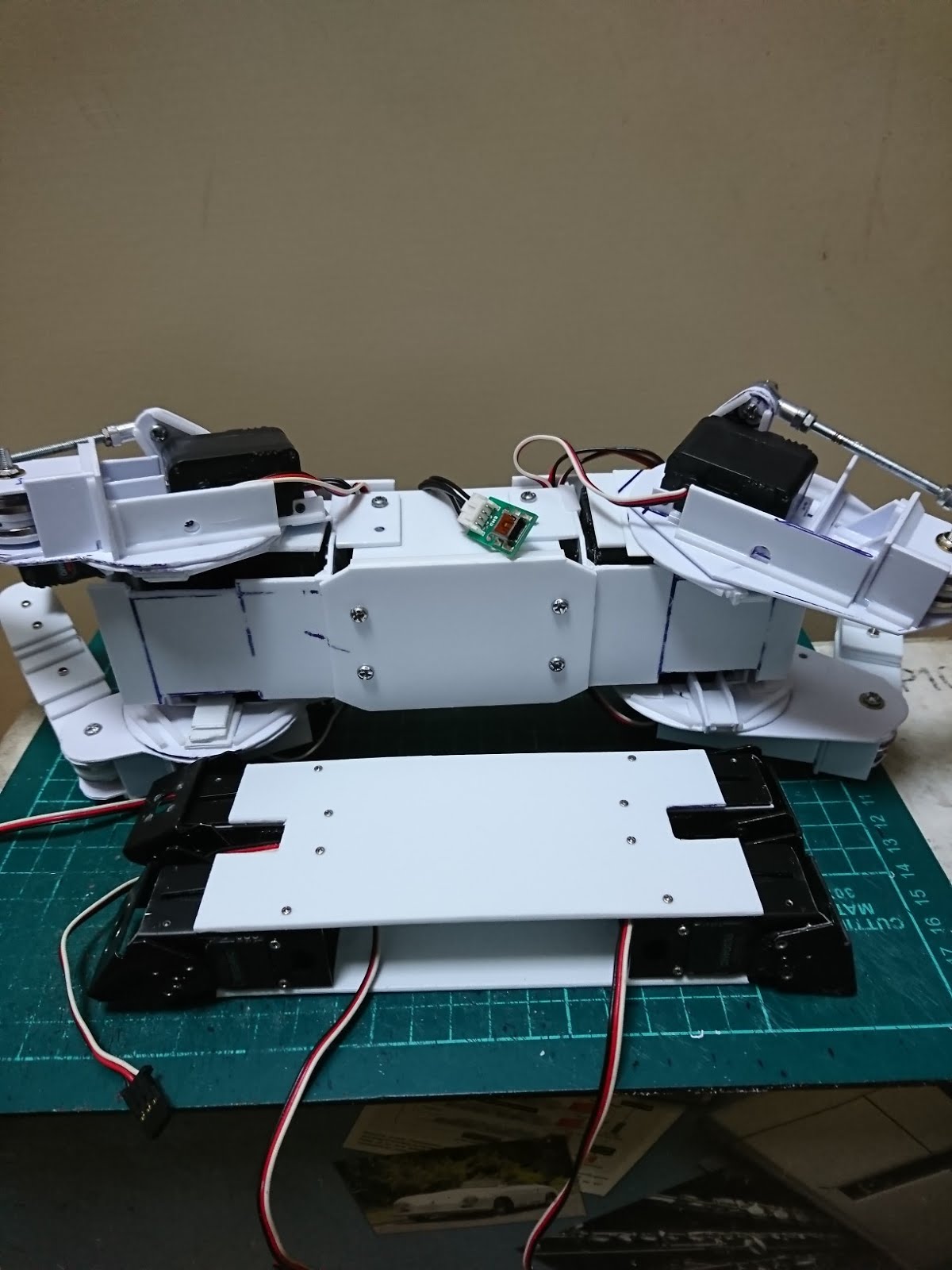
四脚ロボットの背中ヨー軸を動かす機構を作った。
ヨー軸可動部とピッチ軸可動部を並べて見たら、まだ、ピッチ軸が低い。
どうやってピッチ軸を高くすれば良いかな?
ピッチ軸は座り姿勢で背中を曲げるのに使う。
2020年3月30日月曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構のピッチ軸を上にずらした。
リンクを繋げるのは置いといて、ヨー軸を動かす機構を作り始めた。
サーボの周りを囲んで上から蓋する所まで出来た。
ヨー軸可動部もピッチ軸可動部と高さを合わせないといけない。
2020年3月29日日曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構の可動部分を取り付けて、胴体の前半分に噛み合わせた。
可動部が後ろと下に寄ってる。
背中なので可動軸を上にしないといけない。
背中のピッチ軸とヨー軸を同じ作り方にしようと思ったのが間違いだった。
2020年3月28日土曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構の可動部分を作り始めた。
胴体に取り付ける方法を悩む。
後はサーボアームとリンクが必要。
2020年3月27日金曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構でサーボを上から蓋した。
蓋の厚さとネジ留めの羽部分を間違えて1回作り直した。
後はネジ留めの穴を空けて、可動部品とサーボアームとリンクが必要。
2020年3月26日木曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構でサーボのネジ留めを減らす為に、サーボの周りをプラ板で囲んで固定する方式を試作中。
後は上から蓋すればサーボが固定出来る。
可動軸用の穴と可動部品とサーボアームとリンクが必要。
2020年3月25日水曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構の試作。
サーボを横に並べて動かす軸を配置して見た。
この大きさなら胴体に2つ収まりそう。
動かす軸の向きを変えて繋げばピッチ軸とヨー軸になる。
胴体との繋げ方が問題。
2020年3月24日火曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの背中を動かす機構を考えてる。
人型ロボットの腰を動かす機構でいくつか試した物は、ぐらつきや部品が手に入らないので使えない。
3自由度欲しいけど優先度を付けて2自由度にしても良いかな?
2020年3月23日月曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットで爪先を前と後ろに着く姿勢を追加して、歩行に必要な脚の角度を決めた。
斜対歩の脚の動きを再現して見たら意外にまともな歩きが出来た。
ゆっくり動くと傾いてしまうので早く動かす動歩行になった。
目標のキャットウォークはゆっくり動く静歩行が出来ないといけない。
その為には関節を増やさないといけないけど、どうしよう?
2020年3月22日日曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットに脚を付けてサーボオンで動かして見た。
頭を付けてないので重心は胴体の中心に有る。
脚根元直下に爪先を着けて屈伸する動きを作ってから、対角の脚を上げる動きを作って、早く動かしたら傾かずに安定した。
ちょっと回転する。
歩くには爪先を前後に動かさないといけないはず。
爪先を前後に動かさなくても前に傾けたら歩くかも知れない。
頭と電池ボックスとロール軸と、他にも追加したいものがある。
なので、不完全な機体で歩かせても意味が無いような気がする。
2020年3月21日土曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットにアームサポーターをネジ留めする部品を付けた。
1ヶ所だけ僅かに傾いてるけど動きに影響するか分からない。
脚を付けてサーボオンで動かして見よう。
2020年3月20日金曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットにアームサポーターの円板を挟んで脚を仮留めした。
アームサポーターをネジ留めする部品を作り始めた。
このままだと軽過ぎて歩き難いかも知れない。
2020年3月19日木曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットでサーボを天板と底板で挟んでネジ留めした。
サーボが微妙に傾いてるか?
アームサポーター用の円板を作ってるけど形が揃わない。
脚のぐらつきを減らす為に脚ロール軸が無くしたけど、これじゃキャットウォークが出来ないじゃないか?と目標を忘れてた事に気が付いた。
脚ロール軸は後で付けよう。
2020年3月18日水曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットでサーボを板に取り付ける部品をサーボにネジ留めしてプラ棒を接着した。
接着剤が固まったら余分な所を切り取って胴体の天板と底板に接着する。
その時にサーボ後面のネジを外しておかないとサーボが外せなくなる。
その後はアームサポーターを作る。
脚は流用して作業を減らそう。
脚を流用すれば姿勢データがそのまま使える。
2020年3月17日火曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの組み立て易さ、部品の入手を考えて、片持ちサーボアームとアームサポーターにする。
胴体の底板と天板を切り出した。
サーボを板に取り付ける部品を作り始めた。
この部品でサーボの4辺を囲むけどネジ留めするのは胴体外側だけにする。
それだけだと強度に不安が有るのでアームサポーターをネジ留めするつもり。
今はここまでしか考えてない。
2020年3月16日月曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの脚の根元を両持ちサーボアームにする試作。
自作出来ない貴重な部品を使ってしまった事は置いといて、立ち姿勢の時に脚を支えるには不利な形だな。
ピッチ軸サーボを縦に取り付けた方が良さそう。
2020年3月15日日曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットで片脚を上げると、右脚は上がるのに、左脚を上げると傾いて転んでしまう。
アームサポーターの隙間が左右で違ってて、隙間が大きい左脚が重さに耐えられなくて傾くのかな?
何故左脚の隙間が大きくなったのか分からない。
脚を片持ちで取り付けてるからアームサポーターで補強してるけど、脚を両持ちで取り付ける様にすればアームサポーターが要らない。
問題になる所を無くして新しい機体を作ろう。
2020年3月14日土曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの脚先を動かすサーボ周りが気になったのでプラ棒で補強してたら動かす時間がなくなった。
今まで姿勢を調整しててロール軸を使う事が殆ど無かったので、ロール軸可動無しの機体でも良さそう。
ロール軸の代わりに背中を動かせる様にした4号機を作りたくなって来た。
2020年3月13日金曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの脚先を動かすサーボアームを補強したけど、ぐらつきが減らなかった。
前脚は後脚よりもぐらつきが大きいので違いを探して見ると、脚先の関節部分が弱い事が分かった。
前脚に後脚と同じ補強をして見た。
2020年3月12日木曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの姿勢を調整する手順と注意する所を簡単にまとめて、その通り調整してたんだけど、上手くいかない。
ここに来て脚先のぐらつきが影響してる。
脚先を動かすサーボアームの歪みが原因と思って補強する部品を作ってる。
上げる脚と同じ側を高く、反対側を低くすれば脚先のぐらつきが有っても動けるかも知れない。
2020年3月11日水曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの後脚の脚先を10mm伸ばして姿勢を調整してる。
前脚を上げても安定する姿勢は出来た。
後脚を上げて安定する姿勢が出来てない。
後脚を上げる時は胴体後ろ側を水平にしてるけど、胴体を前に傾けるくらい後ろ側を高くして見よう。
2020年3月10日火曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットで爪先位置を変えずに前脚と後脚を上げれるけど、歩くには後脚の長さが足りないので脚先を伸ばす事にした。
最初20mm伸ばして見たら長すぎたので10mmに変更してる所。
2020年3月9日月曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの前脚の脚先の可動範囲が狭かったのでリンクロッドを長くしたらガタつきが大きくなった。
前脚を上げる時と後脚を上げる時で爪先位置を変えると、歩き出す時の動きはどうすれば良いのかな?と思いつつ、出来なくなってた後脚を上げる為の姿勢を調整してた。
色々試して見ると、脚の付け根の四角形の内側に爪先を着いて、胴体の前後の高さを変えると、爪先位置を変えずに前脚と後脚を上げれそうな事が分かった。
ロール軸を動かして、上げる脚と反対側に傾ける必要が有るので、姿勢を繋いで動かす所までは出来てない。
2020年3月8日日曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの爪先を丸めた。
爪先の左右間隔を変えて行って動きが変わるか試そうと思ったけど、基本の立ち姿勢を調整するだけで1時間以上掛かって、あまり試せなかった。
左右の爪先を合わせた姿勢では立てない事はないけど、動かそうとすると転んでしまう。
細い所を歩くには爪先を直線上に交互に着かないといけないけど、それには背中や肩甲骨の可動が必要かな?
猫のビデオを見て動きを観察しよう。
2020年3月7日土曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの後脚の脚先を後ろに曲がる様に戻した。
胴体の前後高さを変えて重心を動かそうとしてたけど分からなくなった。
受動爪先で踏ん張れば少しは傾きが小さくなるかな?
その前に爪先を半球にして見よう。
2020年3月6日金曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの後脚アームサポーターの隙間を詰めて、脚先を前に曲がる様に組み換えた。
脚を上げて安定させるには、上げる脚によって爪先を着く位置を変えないといけない事は変わらなかった。
組み換えた後脚を元に戻そう。
2020年3月5日木曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの後脚の爪先の左右間隔を前脚と同じにした。
前脚を交互に上げる動きをするには、前脚の爪先を脚根元のピッチ軸より前に着いておく。
後脚を交互に上げる動きをするには、前脚の爪先を脚根元のピッチ軸より後ろに着いておく。
その場で足踏みしようとすると、胴体を前後に動かす事になるので不安定になるけど、自然界で足踏み出来る四脚動物は居ないんじゃないか?
後脚を前脚と同じ方向に曲げる様にしたら、爪先を着く位置が変わるかな?
2020年3月4日水曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットで左右の脚を交互に上げる動きをして見た。
前脚は出来る様になったのに後脚が出来なくなった。
爪先の左右間隔が後脚の方が広いのが原因だと思う。
なので後脚の爪先を胴体内側に近くする部品を作って見る。
後脚のロール軸を動かして爪先の左右間隔を狭くするのも試して見る。
2020年3月3日火曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの後脚のガタつきを無くす為に2節に組み換えた。
手で動かして見た感じはガタつかなくなった。
ガタついたのはピロボールのせいか、または劣駆動の機構が良くなかったのか不明。
サーボオンで屈伸してどうなるか確認しよう。
2020年3月2日月曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの前後脚の作り直しが終わったので動作確認して見た。
爪先を脚根元のピッチ軸より前に着いて立つ姿勢を高さを変えて2つ用意して連続して動かすと、後脚が止まって見えた。
持ち上げて動かすと後脚が動いている。
後脚を動かす範囲が小さくてガタつきの範囲と同じくらいなので動かない様に見える?
前脚は動いているので、後脚の形を前脚に合わせればガタつきがなくなって動けるかも知れない。
2020年3月1日日曜日
実験用ロボット
実験用ロボットを作っている。
四脚ロボットの前脚を付けたけど、アームサポーターとサーボの間に隙間が残ってるので詰めないといけない。
前後の脚の長さが違うので座ると前に傾くのは前から変わってない。
左右の前脚を交互に上げるには重心を胴体後ろ側に寄せないといけないので後脚を曲げる事を考えてたけど、爪先を脚根元のピッチ軸より前に着いておけば良いんじゃないかと思った。
そのためには、爪先を床に対して少し傾けて立たないといけない。
静止状態では爪先を床に対して垂直にした方が安定する。
新しい投稿
前の投稿
ホーム
登録:
投稿 (Atom)
フォロワー
ブログ アーカイブ
►
2024
(115)
►
4月
(24)
►
3月
(31)
►
2月
(29)
►
1月
(31)
►
2023
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2022
(364)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(29)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2021
(367)
►
12月
(31)
►
11月
(31)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(31)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
▼
2020
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
▼
3月
(31)
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
►
2月
(29)
►
1月
(31)
►
2019
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(30)
►
6月
(30)
►
5月
(31)
►
4月
(31)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2018
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2017
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2016
(356)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(29)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(20)
►
1月
(32)
►
2015
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2014
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2013
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2012
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(32)
►
7月
(29)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(30)
►
1月
(31)
►
2011
(360)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(28)
►
8月
(31)
►
7月
(31)
►
6月
(25)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(32)
►
2010
(387)
►
12月
(34)
►
11月
(36)
►
10月
(33)
►
9月
(33)
►
8月
(36)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(33)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2009
(219)
►
12月
(31)
►
11月
(31)
►
10月
(33)
►
9月
(31)
►
8月
(35)
►
7月
(50)
►
6月
(8)
自己紹介
ichiro
詳細プロフィールを表示