skip to main
|
skip to sidebar
space
2016年4月30日土曜日
実験用ロボット
実験用ロボットを作っている。部品配置をまとめてみた。膝の所のサーボのはみ出しを減らすには脚を太くするしかない。お腹側はマイコンを配置しないと電池ボックスが付けられない。マイコンの幅に合わせて胴体を太くする。全身を書いて体型を確認しよう。
iPhone用のポケットフルセグチューナーを持っていたので使って見たらもうこれで良いと思った。
2016年4月29日金曜日
実験用ロボット
実験用ロボットを作っている。部品切り出し用の型紙を作った。サーボと電池ボックスを斜めに配置したら太ももに収まりそう。お腹に二本の電池ボックスを付ければいい。少し太めの体型にしたい。手足を短くして胴体を長くする方法もあるけど幼児を連想させる体型は止めておこう。今日は太ももを作ってみよう。
2016年4月28日木曜日
実験用ロボット
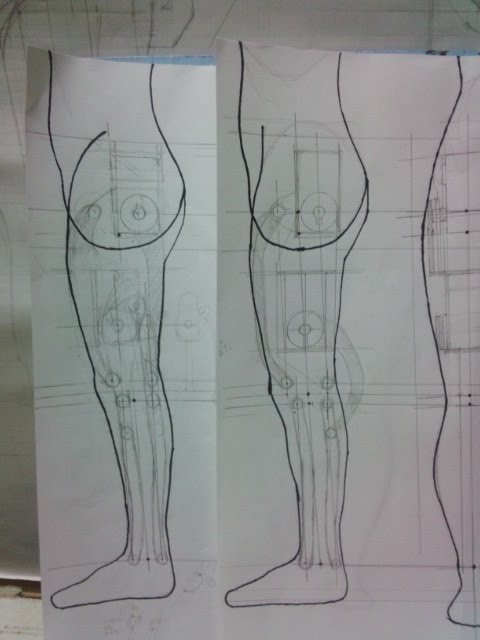
実験用ロボットを作っている。30cmの横から見た全身図を書いてみた。前から見た時に比べてサーボの前後に余裕がある。マイコンと電池ボックスを配置したらケーブルがはみ出しそう。電池ボックスを外付けにしてしまうかな?連休中に少しは形にしたい。
2016年4月27日水曜日
実験用ロボット
実験用ロボットを作っている。30cmの全身図を書いてみた。まだ小さいサーボの使い方が分かってないのでサーボ直動の関節にした。肩はピッチ軸だけにして軽くする。これで300gくらいに収まるんじゃなイカ?股関節ピッチ軸はちょっと大きい方のサーボを使おうかな?
新しいプリペイドSIMを用意出来たけど5月末までしか使えない。6ヶ月使えるSIMは在庫がなかった。
2016年4月26日火曜日
実験用ロボット
実験用ロボットを作っている。小さいサーボを使って胴体を小さく出来るか考えてみた。40cmを30cmに縮められそう。四本の電池ボックスは使えないので分割しないといけない。脚はサーボホーンをネジキャップで覆う方法で良さそう。
プリペイドSIMの期限が切れたので用意していたプリペイドSIMに換えてアクティベートしようとしたらクレジットカード番号が要る事が分かって使えなかった。パッケージにはそんな事書いてないので分からなかった。帰りに別のプリペイドSIMを買って来るしかない。
2016年4月25日月曜日
実験用ロボット
実験用ロボットを作っている。膝下に穴開けしたらプラ板が少し剥がれた。もっと大きな穴を開けるにはプラ板を剥がして削るしかない。腰のくびれの所に板を付けた。リセットスイッチが有る方は後で何とかしないといけない。小さいサーボを二種類手に入れた。金属ギアだけどサーボホーンがプラスチック製しかないのが残念。サーボアームを付けて両持ちにするとRS-304と変わらない幅になってしまうので片持ちにしてサーボホーンをネジキャップに見せかけると良いと思った。実際に使うとしたら華奢な肩の所かな?
2016年4月24日日曜日
実験用ロボット
実験用ロボットを作っている。膝下をプラ板で埋めて形を整えた。やっぱり重くなったので下から穴を開けて少しでも軽くしよう。でも太ももの重さと比べたら軽いかな?足裏にパイプを付けて膝下の穴に差し込むやり方もある。
今日は秋葉原に買い出しに行くつもり。連休中は部屋にこもって作業しよう。
2016年4月23日土曜日
TV
手に入れたネットワークTVチューナーは常時インターネットに繋がってないと使えないのでもういいや。視聴は出来ても録画予約が出来ないとかチャンネル切り替えが遅すぎる不満もある。
ロボット作業のモチベーションが湧いてこない。
2016年4月22日金曜日
TV
テレビの録画視聴環境を変えようとしている。PCにUSBで繋ぐTVチューナーが手に入り難くなってきたのでネットワーク環境も無いのにネットワークTVチューナーを手に入れてしまった。ファームウェアを書き換えるためにandroid端末のUSBテザリングをPCのブリッジ接続で無線ルータのWANに繋いでTVチューナーをLANに繋いでiPhoneアプリでWiFiからアクセスした。一応TVが見れる事を確認したので無線ルータのWANからケーブルを抜いてiPhoneで無線ルータに繋ごうとしたらIPアドレスの取得中から先に進まなくなった。WAN側が繋がってないとLAN側が使えないものなのか?
2016年4月21日木曜日
実験用ロボット
実験用ロボットを作っている。膝下を削って形を整えてみようとしたけどなかなか思うように削れない。中身が詰まっていると重くなるので下から穴を開けようと思ったけど面倒だな。やっぱり外装は薄皮にしたい。
2016年4月20日水曜日
実験用ロボット
実験用ロボットを作っている。足裏を作り始めた。足首の所に別の板を付けて繋ぐつもり。上側と下側の幅の違いをどうやって埋めようかな?膝下内側に板を追加した。ここは削って形を整えてみよう。二本づつの電池ボックスを上手く配置出来ないかな?
2016年4月19日火曜日
実験用ロボット
実験用ロボットを作っている。太もも外側と後ろ側に枠を追加した。太もも内側はサーボアームが有るので枠を付けれない。次は水平断面の枠を付けようかな?電源スイッチのケーブルが取れてた。
2016年4月18日月曜日
実験用ロボット
実験用ロボットを作っている。首を付けて胸と背中の枠を追加。脚の輪郭も分かるように枠を追加。図から型紙を作ってプラ板を切り出しているのに付けて見たらおかしな形になってしまった。そういうのは後で直す。
2016年4月17日日曜日
実験用ロボット
実験用ロボットを作っている。肩サーボを取り付けて腰の所を少し狭くした。脚からマイコンへケーブルを通す穴を空けた。電源スイッチの固定方法を考えている。肩幅が少し広くなった。今日は首を付けよう。予備サーボを使うと腕も作れる。でも電池ボックスが1つしかないので二台を同時に動かす事は出来ない。プラ板を買いに行った時に電池ボックスを探したけど欲しいのがなかった。
2016年4月16日土曜日
実験用ロボット
実験用ロボットを作っている。プラ板を挟んで電池ボックスとマイコンを取り付た。肩サーボを取り付ける板を切り出した。マイコンと肩サーボの間の隙間は確保出来そう。
2016年4月15日金曜日
実験用ロボット
実験用ロボットを作っている。電池ボックスを縦に取り付ければ腰に丸みを付けれるんじゃないかと考えてみた。電池ボックスをお腹か背中のどちらに配置するか迷ったけどとりあえずお腹側に配置する。マイコンと肩サーボの間に隙間が採れない。
2016年4月14日木曜日
実験用ロボット
実験用ロボットを作っている。腰の水平断面の板を付けた。電池ボックスとサーボを収める事を考えたら角張った形になった。電池は膝下に一本づつ収まりそうに見えるけど電極やケーブルを配置しようとしたら難しい。以前作った胴体を使えないかと思ったけど継ぎ接ぎしないといけないんじゃ新しく作った方が良さそう。プラ板が残り少なくなったので週末に補充しよう。
2016年4月13日水曜日
実験用ロボット
実験用ロボットを作っている。膝のサーボ制御が難しくならないようにサーボアームを短くした。膝の可動範囲は一昨日とほぼ同じになった。サーボアームを短くしたので膝の可動範囲が狭くなると思っていたけどサーボの動作範囲が広くなっていた。真っ直ぐ立った状態で膝の後ろ側にサーボアームが出っ張っている。太ももに外装を付ければ隠れるので問題ない。膝周りはこれくらいにして胴体の作業に進もう。
2016年4月12日火曜日
実験用ロボット
実験用ロボットを作っている。膝を深く曲げれるようにサーボアームの長さと長穴を調整した。もっと曲げようとすると膝の軸とぶつかる。サーボの動く範囲は変わらないので膝の可動範囲を広げると制御し難い。逆に歩くのに最低限必要な可動範囲に狭くしてみよう。
2016年4月11日月曜日
実験用ロボット
実験用ロボットを作っている。膝周りの厚さを調整してネジがこすれないようにした。足首に向かって内側に曲がるように板を追加した。外側の板は残して後で形を整える。下腹部の板を切り出してサーボを取り付けた。腰から上に繋げるために腰の所に水平断面の板を付けよう。膝の曲がりが足りないかな?最大の曲げ角度に合わせてサーボアームの長さを作れば良いハズだけど真っ直ぐの状態に戻れるかな?膝からはみ出さない範囲に収まるか?試してみよう。
2016年4月10日日曜日
実験用ロボット
実験用ロボットを作っている。膝周りの部品が揃ったので組み立てた。手で膝を動かして見るとネジの頭がこすれる所がある。隙間が少し足りない。板を貼り付けて調整しよう。足首から下は下腹部に脚を取り付けてから作るつもり。
2016年4月9日土曜日
実験用ロボット
実験用ロボットを作っている。膝の軸周りを厚くする部品と膝下を動かす板に追加する部品を作った。もう少し部品を作らないといけない?
2016年4月8日金曜日
実験用ロボット
実験用ロボットを作っている。太ももと膝下を繋いでみた。軸周りの厚さが足りなくて自立出来ない。軸周りだけ厚くしよう。膝下を動かす板と膝下側で受ける部品を作った。膝下側の部品を取り付けるための部品が要る。
機械設計の基本を知らないので簡単な機構で間違える。
2016年4月7日木曜日
実験用ロボット
実験用ロボットを作っている。太ももと膝下を繋ぐ部品を切り出して穴開けした。今朝二枚づつ貼り合わせて置いたので帰る頃には固まっているはず。今日は、この部品を太ももに接着してから膝下を動かす板を作ろう。板が暴れないようにガイドが要るかな?
2016年4月6日水曜日
実験用ロボット
実験用ロボットを作っている。膝下の枠の形を整えてから4枚貼り合わせた。固まるまで次の作業は出来ない。今日は太ももと膝下を繋ぐ部品を作ろう。
2016年4月5日火曜日
実験用ロボット
実験用ロボットを作っている。サーボを連結する部品が出来た。膝に繋がる部品は後回し。膝下の枠を切り出して形を整えている所。プラ板を4枚貼り合わせれば強度は大丈夫だと思う。
2016年4月4日月曜日
実験用ロボット
実験用ロボットを作っている。平行リンクを使うのは止めて股関節ピッチ軸をサーボ直動、膝は太ももに配置したサーボから長穴リンクで動かす。足首はとりあえず固定。と言う方針で先ずはサーボを連結する部品を作っている所。
2016年4月3日日曜日
実験用ロボット
実験用ロボットを作っている。骨格模型がポロッと出てきて眺めてたら新しい脚の股関節の位置が下過ぎる事に気がついた。今のところ機体の脚は問題なかった。なので股関節の位置を直して機構を考えていたけど脚からはみ出さないようにして動かすのは無理なんじゃ?と思い始めた。もうちょっと考えてみるけどダメなら今の脚を動かす事にしよう。
2016年4月2日土曜日
実験用ロボット
実験用ロボットを作っている。新しい脚の太もも後ろ側リンクの部品にサーボを仮留めした。股関節ピッチ軸サーボと繋ぐ所は幅を広くするので切り取って接着し直す。上下に分割した方がサーボに取り付け易くなる。膝ピッチ軸の方は幅を狭くしたい。
2016年4月1日金曜日
実験用ロボット
実験用ロボットを作っている。新しい脚の太もも後ろ側リンクの部品に穴を空けている所。膝下を動かすリンクを今の機体で試してみた。太ももを曲げる時に膝下が勝手に曲がらないようにサーボアームを動かさないといけないと思っていた事がその通りだった。リンクを前側に付けた場合も試してみたら力点と作用点の位置関係によっては制御出来なくなった。実際のリンクはどうしようかな?
新しい投稿
前の投稿
ホーム
登録:
投稿 (Atom)
フォロワー
ブログ アーカイブ
►
2024
(117)
►
4月
(26)
►
3月
(31)
►
2月
(29)
►
1月
(31)
►
2023
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2022
(364)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(29)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2021
(367)
►
12月
(31)
►
11月
(31)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(31)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2020
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(31)
►
2019
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(30)
►
6月
(30)
►
5月
(31)
►
4月
(31)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2018
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2017
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
▼
2016
(356)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(29)
►
6月
(30)
►
5月
(31)
▼
4月
(30)
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
TV
TV
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
►
3月
(31)
►
2月
(20)
►
1月
(32)
►
2015
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2014
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2013
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2012
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(32)
►
7月
(29)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(30)
►
1月
(31)
►
2011
(360)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(28)
►
8月
(31)
►
7月
(31)
►
6月
(25)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(32)
►
2010
(387)
►
12月
(34)
►
11月
(36)
►
10月
(33)
►
9月
(33)
►
8月
(36)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(33)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2009
(219)
►
12月
(31)
►
11月
(31)
►
10月
(33)
►
9月
(31)
►
8月
(35)
►
7月
(50)
►
6月
(8)
自己紹介
ichiro
詳細プロフィールを表示