skip to main
|
skip to sidebar
space
2016年6月30日木曜日
実験用ロボット
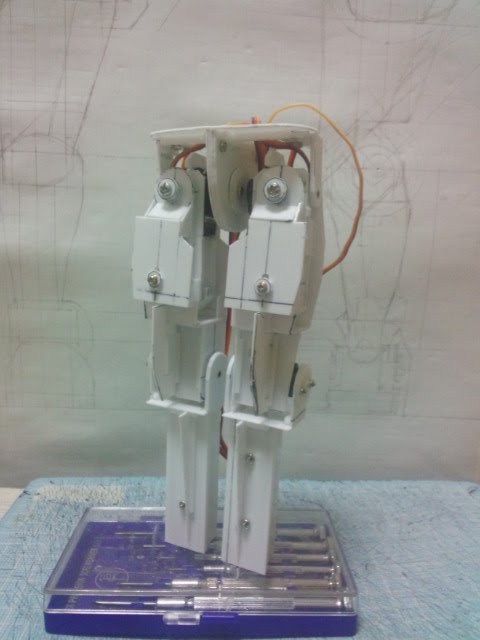
実験用ロボットを作っている。
サーボケーブルの穴を合わせて胴体と繋げて見た。胴体は作り直さないといけないけどこんな感じで良いんじゃないか?
ロール軸周りの補強を追加した。太ももの水平断面の板を付けて丸みを持たせながら補強したい。
2016年6月29日水曜日
実験用ロボット
実験用ロボットを作っている。
捻れの対策で太もも前側を補強して見たけど効果がないみたい。リンクの所でサーボホーンをネジ留めしておかないと取れてしまう事がある。リンクの所は組み立て難い。ロール軸の所をもう少し補強出来るんじゃないか?
2016年6月28日火曜日
実験用ロボット
実験用ロボットを作っている。
捻れの対策でロール軸周りを補強した。太もも後ろ側は板を2枚にしたので強くなった。前側はリンク穴を避けて板を2枚にすれば良さそう。
足首から先を付けるとしてピッチ軸をまったくフリーにして良いのかな?ぜんまいバネで少し抵抗させたいけど適当な部品がない。
2016年6月27日月曜日
実験用ロボット
実験用ロボットを作っている。
電池ボックスを基に膝下の枠を作って膝サーボアームに接着した。この状態だと前側に重心があるので倒れ易い。足首から先が無いので脚が短く見える。なので足首から先を作ろう。捻れの対策が出来てない。
2016年6月26日日曜日
実験用ロボット
実験用ロボットを作っている。
膝サーボのサーボアームを作った。股関節から膝まで組み立てて動かして見た。歩いて座る動作には問題ない可動範囲だと思う。横から見ると太もも前側が僅かに下腹部より前に出ていて膝に向かっての差が大きい。これを直すには脚の作り直しになるので止めておく。次は電池ボックスを基に膝下の枠を作って膝サーボアームに接着する。足首関節は作らない。
2016年6月25日土曜日
実験用ロボット
実験用ロボットを作っている。
ロール軸サーボホーンにピンを立てて枠に穴を開けた。これで太ももが動かせる。膝サーボを接着した。次は膝下の枠を作ろう。
2016年6月24日金曜日
実験用ロボット
実験用ロボットを作っている。
太ももの枠が形になった。傾きはないみたい。ロール軸サーボホーンにピンを立てて枠に穴を開けないといけない。捻れの補強が必要。膝サーボも付けないといけない。
2016年6月23日木曜日
実験用ロボット
実験用ロボットを作っている。
太ももの枠の部品を切り出した。段差のない後ろ側を基準に作って行く。膝サーボに繋がる板を接着した。前側は段差と左右のズレも付ける。段差の高さが決まってない。
2016年6月22日水曜日
実験用ロボット
実験用ロボットを作っている。
部品が揃ったので下腹部を組み立てた。ロール軸の歯車を小さな物に変えてぶつからない事を確認した。前後幅を抑えるには段差の付いたロール軸の枠が必要になる。ロール軸の長さを決めた。
2016年6月21日火曜日
実験用ロボット
実験用ロボットを作っている。
ピッチ軸のサーボ軸を内側に変える板に腰の水平断面の板を接着した。フリー軸のサーボアームも作った。これはネジ留めする。ロール軸がぶつかるのは小さな円にすれば解消するハズ。
2016年6月20日月曜日
実験用ロボット
実験用ロボットを作っている。
股関節ピッチ軸サーボとロール軸サーボを囲む枠が出来たので有り合わせの部品で仮組してみた。ロール軸がぶつかって太ももが途中までしか曲がらない。ロール軸の左右間隔が狭いので脚を開いた時に枠が見えてしまう。ロール軸の可動範囲は広くなくて良いと思っているけどこのままじゃ駄目だ。
ピッチ軸のサーボ軸を内側にして下腹部を伸ばせば良さそう。
2016年6月19日日曜日
実験用ロボット
実験用ロボットを作っている。
股関節ピッチ軸サーボとロール軸サーボを囲む枠に部品を追加している所。サーボを取り外せるようにしながら上手く固定しないといけない。ロール軸の幅が広いので後ろ側のロール軸のホーンを前にずらして狭くしよう。
2016年6月18日土曜日
実験用ロボット
実験用ロボットを作っている。
前日に描いた図を基に部品を作り始めた。股関節ピッチ軸を取り付ける股間の板を作った。股関節ピッチ軸サーボとロール軸サーボを取り付ける枠を作っている所。サーボを取り外せるようにしないといけない。
腰ロール軸を自在継ぎ手にしたら胴体が伸びるけど40cmには収まるんじゃないか?
2016年6月17日金曜日
実験用ロボット
実験用ロボットを作っている。
行き詰まったので考え直した。膝の幅を基準にすると高さ40cmくらいが妥当だけど胴体の長さを変えなければ30cmを少し越えるくらいに収まりそう。前後の太さを収めるには股関節ロール軸を離れた所からリンクで動かすしかない。股関節ピッチ軸を片持ちにしてどうなるか試してみる。腰ロール軸は保留。
2016年6月16日木曜日
実験用ロボット
実験用ロボットを作っている。
お尻と太ももの境界をはっきりさせるため股関節ロール軸サーボの枠の後ろ側を削った。太ももの後ろ側も削るつもり。
股関節ロール軸のフリー軸周りをちょっと直したら左右の脚の長さが変わってしまった。どこが原因なのか分からない。
このまま続けて上手く行くのかな?
2016年6月15日水曜日
実験用ロボット
実験用ロボットを作っている。
膝サーボを接着した。サーボの取り外しをするには余計な部分を切り取らないといけない。フリー軸を取り付ける枠を作ったけどまだ接着してない。股間からお尻にかけての枠を付けたけど股関節ロール軸のサーボアームの方が後ろになってしまった。お尻と太ももの境界をはっきりさせるには股関節ロール軸の枠を切り取っておかないといけない。
2016年6月14日火曜日
実験用ロボット
実験用ロボットを作っている。
サーボケーブルを通す穴を中央の一つに纏めた。膝サーボの位置を決めた。お尻と太ももの区別が無いので太ももの途中から細くしたい。股間からお尻にかけての枠も追加しよう。脚を動かしたりするとブレる。しっかり取り付け出来てない所がある。
2016年6月13日月曜日
実験用ロボット
実験用ロボットを作っている。
腰ロールと股関節ピッチ軸のサーボアームを補強してネジ留めした。サーボケーブルを通す穴を開けたけど中央の一つに纏めた方が良いな。膝サーボに繋がる枠を仮で接着した。今更だけど股関節ロール軸サーボの取り付け向きを逆にした方が良かったんじゃないか?
IchigoJamを配線して動かせた。アダプター経由のキーボードは上手く動かなかったけどアダプター無しのキーボードは問題ない。ファームの書き換えをしたいのでシリアルアダプターが要る。電圧が合わないみたいだけどトレラント端子じゃないのかな?
2016年6月12日日曜日
実験用ロボット
実験用ロボットを作っている。
腰ロールと股関節ピッチ軸のサーボアームがほぼ出来た。ネジ留が残っている。サーボアームの角を削りたいけど強度が下がりそう。サーボケーブルを通す穴も開けないといけない。
先週IchigoJamを手に入れたのにまだ動かせてない。手持ちのシリアルアダプターが使えるか確認しないといけない。
2016年6月11日土曜日
実験用ロボット
実験用ロボットを作っている。
サーボアームのサーボホーンに取り付ける部分を作って見たら厚過ぎた。サーボホーンの内側に取り付けるには1mmの厚さにしないといけない。
腰ロール軸サーボに繋がる枠はロール軸のサーボアームの動きを邪魔しないようにする。
2016年6月10日金曜日
実験用ロボット
実験用ロボットを作っている。
腰ロール軸サーボの側面に股関節ピッチ軸サーボを配置する形にしてみた。胴体の長さは変えない。股関節ピッチ軸サーボのサーボアームを腰ロール軸サーボに取り付ける。股関節ロール軸の間隔が広がるのが気になるけど全身が出来たら印象が変わるかもしれない。
2016年6月9日木曜日
実験用ロボット
実験用ロボットを作っている。
股関節ユニットでサーボケーブルが抜けるように直した。腰の水平断面の形を変えて股の板を接着した。股関節ピッチ軸のサーボアームを作って固定する。
腰可動軸を肩ピッチ軸サーボからのリンクとスラストベアリングで実現したい。腰にサーボを追加するよりコンパクトにしたいけど胴体の長さを変えないようにするにはマイコンを変えないと駄目だから悩ましい。
2016年6月8日水曜日
実験用ロボット
実験用ロボットを作っている。
股関節ロール軸サーボのフリー軸を付けた。サーボケーブルを囲んでしまってサーボが外せなくなった。板を剥がしてサーボケーブルを抜けるようにしないといけない。
股関節ロール軸で傾いた上半身を逆方向に傾かせるために腰ロール軸が要るかな?肩ピッチ軸サーボを無くせば付けられそう。腕を動かして前後のバランスをとるつもりだったので腕無しの影響が分からない。サーボを減らして軽量化するつもりだったのに困ったな。
足首の関節を省略した時の歩き方でハイヒールの歩き方が参考にならないかな?
2016年6月7日火曜日
実験用ロボット
実験用ロボットを作っている。
サーボの羽を両方切り落として囲む枠はネジ留めをどうするか思いつかなかった。股関節ピッチ軸サーボのフリー軸を付けた。ロール軸サーボのフリー軸も付ける。
マイコンをRCB3にすれば大きさは問題ないけど電源電圧が合わない。レギュレーターを取り替えれば良さそうだけど良く分からない。サーボ電源を別供給出来るのかな?
2016年6月6日月曜日
実験用ロボット
実験用ロボットを作っている。
股関節ユニットが形になったので仮組してみた。ロール軸をもう少し内側にしたい。膝にクラウンギアを使うと脚が伸びてしまうので直動にする。クラウンギアを使うために苦労したのにサーボホーン分しか細く出来なかった。ロール軸サーボを水平に取り付けたら脚を伸ばさずにクラウンギアの膝が使えるけどロール軸位置がおかしくなる。サーボの羽を両方切り落として囲めるような枠が作れるかな?
マイコンをプログラムを作る手間がもったいないので変えない。使ってない側面のピン部分を切り取れざ5mm細くなる。
2016年6月5日日曜日
実験用ロボット
実験用ロボットを作っている。
メタルギアのサーボ10個だと300gを越えそうなのでプラスチックギアのサーボを手に入れた。股関節の枠にギアを付けるのは止めてピッチ軸サーボを水平にして、その下にロール軸サーボを配置する枠を作ってみた。ロール軸サーボの羽は切り落とした。ピッチ軸とロール軸がズレるのは仕方ない。
傘歯車を手に入れだけど使い方はこれから考える。
マイコンをいくつか手に入れたけどピンヘッダを付けたらかさばるので無駄だったかな?
2016年6月4日土曜日
実験用ロボット
実験用ロボットを作っている。
股関節の枠の残り一面を付けた。サーボアームは長めにしないといけないかな?脚を長くしないと膝サーボとぶつかりそう。
予備も兼ねてサーボを補充したい。傘歯車や小さいマイコンも欲しいので秋葉原に行こう。
2016年6月3日金曜日
実験用ロボット
実験用ロボットを作っている。
股関節の枠を作り直した。枠の外側からサーボを挿入するようにした。組み立ての都合で四面を囲む所が三面までしか出来てない。現物合わせのため肩ピッチ軸サーボを外そうとしたらここでも枠が外側になっていたので枠を壊してしまった。なので胴体も作り直さないといけない。なんでこんなに失敗を繰り返してしまうのか?
2016年6月2日木曜日
実験用ロボット
実験用ロボットを作っている。
膝のギアの噛み合わせは上手く調整出来た。
股関節の枠を作って見たらサーボが外せない事に気が付いた。枠の外側からサーボを挿入しないといけない。ロール軸とピッチ軸の幅が違うので段差の所にナットを埋めれば良いかな?
2016年6月1日水曜日
実験用ロボット
実験用ロボットを作っている。
膝のギアの噛み合わせが上手く調整出来てなかったのでもう一度調整した。左右の位置調整は止める。
股関節のロール軸用の枠は今までと同じに作って後で直す。ピッチ軸用の枠はロール軸の枠と繋がるようにする。ここでもギアの噛み合わせを調整しないといけないけど平ギア同士なのでそれほど難しくないと思う。
新しい投稿
前の投稿
ホーム
登録:
投稿 (Atom)
フォロワー
ブログ アーカイブ
►
2024
(123)
►
5月
(2)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(31)
►
2023
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2022
(364)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(29)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2021
(367)
►
12月
(31)
►
11月
(31)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(31)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2020
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(31)
►
2019
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(30)
►
6月
(30)
►
5月
(31)
►
4月
(31)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2018
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2017
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
▼
2016
(356)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(29)
▼
6月
(30)
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(20)
►
1月
(32)
►
2015
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2014
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2013
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2012
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(32)
►
7月
(29)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(30)
►
1月
(31)
►
2011
(360)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(28)
►
8月
(31)
►
7月
(31)
►
6月
(25)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(32)
►
2010
(387)
►
12月
(34)
►
11月
(36)
►
10月
(33)
►
9月
(33)
►
8月
(36)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(33)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2009
(219)
►
12月
(31)
►
11月
(31)
►
10月
(33)
►
9月
(31)
►
8月
(35)
►
7月
(50)
►
6月
(8)
自己紹介
ichiro
詳細プロフィールを表示