skip to main
|
skip to sidebar
space
2019年4月30日火曜日
実験用ロボット
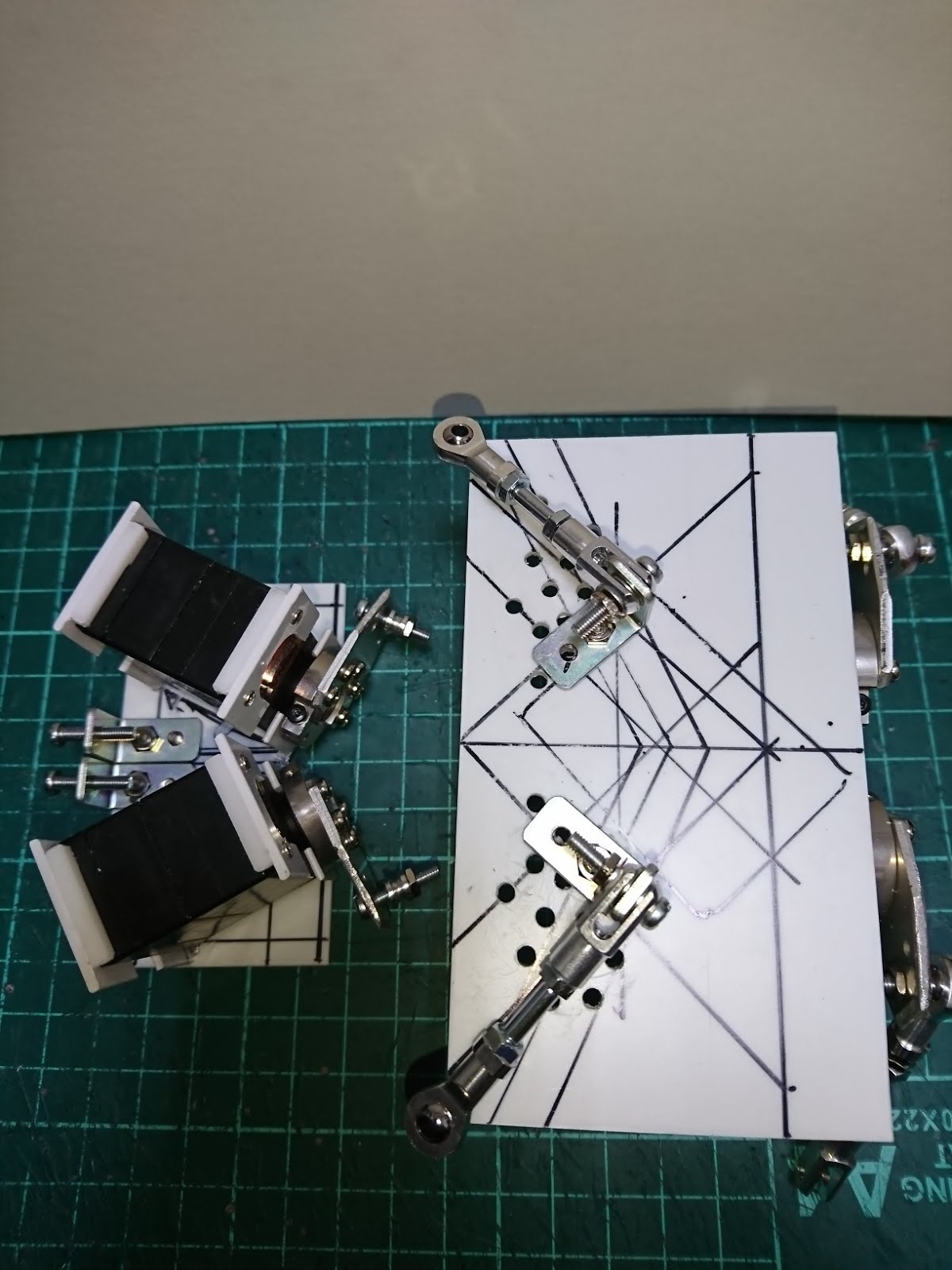
実験用ロボットを作っている。
干渉駆動のサーボを横に取り付けて仮組みして見たら余計な動きをして駄目だったので、サーボを前後方向に取り付けて動きを見ている所。
3つの軸受けを正三角形に配置して、サーボアームとシャフトの交点をサーボ軸と軸受けを結ぶ線より外側にすれば余計な動きをしないと言うのは分かった。
サーボを縦にする方法も試して見よう。
2019年4月29日月曜日
実験用ロボット
実験用ロボットを作っている。
腰と背中の干渉駆動用にサーボを横に取り付ける部品を台座に接着した。
部品補充に出かけて最低限の物は手に入れたけど小さな3Dプリンターは在庫切れだった。
大人のオモチャを見てたら骨格を埋め込んだ物が有ったので手に入れた。
骨格は思ったより柔らかかったので骨格を取り出して使うのは無理だ。
作ろうとしてる機体の胴体とほぼ同じ大きさなので水平断面の形を取るためにテープを貼ってからグルーを塗って見た。
前半分を塗った所で腕が痛くなったので中断した。
2019年4月28日日曜日
実験用ロボット
実験用ロボットを作っている。
腰と背中の干渉駆動用にサーボを横に取り付ける部品を作っている所。
部品補充に出かけるつもり。
サーボを補充したいけど資金が足りないので手持ちサーボで何とかする。
サーボの代わりに小さな3Dプリンターを手に入れたいな。
電圧が不安定なのは安定化電源で何とかなりそうだけど湿気が多くてフィラメントが持たないかもしれない。
出力する手段がなくて3DCADを勉強しないと言う言い訳が出来なくなる。
手に入らなければ別の物を考えてる。
2019年4月27日土曜日
実験用ロボット
実験用ロボットを作っている。
肩を鎖骨から動かすには向きの違う干渉駆動を連結する事になると考えてて、腰関節も同じ考えで実現出来るんじゃないかと簡単な図を描いて見た。
腰と背中が曲がればより自然な動きになるし猫背が出来て前転がしやすくなる。
ただし機構が胴体に収まればの話。
連休中に機体作りを進めるには部品が足りないので補充しないといけない。
とは言うものの何が足りなくなるか未知なので余計な物まで補充しそう。
2019年4月26日金曜日
実験用ロボット
実験用ロボットを作っている。
腰関節を4サーボで構成するのは止めて2自由度干渉駆動にヨー軸サーボを組み合わせた図を描いて見たら高さが低くなった。
ヨー軸を両持ち相当にする構造で悩みそうだけど動かすのは楽になる。
ロボットの腰関節を検索してたら、有限会社ピノキオの人型機械と言うのを見つけた。
成人女性に合わせた体型でHRP-4Cよりスリムに見えるけど、立ち姿勢で台車移動すると言う残念な動きだった。
中臀筋相当のアクチュエータがついてるのは珍しいけど、片持ちで付いてるみたいで強度は大丈夫なのか?と思った。
2019年4月25日木曜日
実験用ロボット
実験用ロボットを作っている。
腰関節の下サーボを並列、上サーボを外に広がる様に配置したら、サーボアームを動かさなくてもぐらぐらして駄目だったので、上サーボを内側に狭まる様な配置に戻した。
この配置でも軸受け位置によってはヨー軸の動きが出来ないので干渉駆動でヨー軸を動かす事を諦めるかな?
股関節ピッチ軸サーボの周りを囲む部品を外せない事に気が付いた。
左右に分割するか、アームサポーターの所にクランプホーンのネジを締めるための溝を掘らないといけない。
2019年4月24日水曜日
実験用ロボット
実験用ロボットを作っている。
腰関節の上と下のサーボを前日とは逆の向きに取り付けて見た。
サーボの台座に板を追加して軸受けを取り付け出来るようにした。
やっぱりヨー軸の動きは出来ないな。
V字と並列の組み合わせに戻すか。
ユニバーサルジョイントだとヨー軸の動きが出来ないのでピロボールとL字金具でボールジョイント相当を組んで見た。
思ってた動きは出来た。
2019年4月23日火曜日
実験用ロボット
実験用ロボットを作っている。
腰関節関節の上サーボを下サーボと同じく並列に取り付けて見たらヨー軸の動きが出来なくなった。
サーボアームがヨー軸方向に動けないので当然だな。
それならと、上と下のサーボをV字に取り付けて見たけど、サーボアームが中心に凹む様な配置になって、やっぱりヨー軸の動きが出来なかった。
サーボアームが中心に突き出る様な配置にすれば良いハズで、それにはサーボの台座を新しく作るしかない。
2019年4月22日月曜日
実験用ロボット
実験用ロボットを作っている。
股関節ピッチ軸周りを囲む部品を取り付けた。
座った時に左右に傾かない様にお尻の板を付けた。
股関節の位置を前後方向の中間にしたけどお腹側に寄せる方が良いかな?
干渉駆動の作業は進んでない。
腰関節関節の上サーボを下サーボと同じく並列に取り付けても良いんじゃないか?と思った。
2019年4月21日日曜日
実験用ロボット
実験用ロボットを作っている。
股関節の干渉駆動する機構でロールとピッチの動きが出来れば台座を傾けてロールがヨーになってピッチがロールになる。
組み立て易い様にサーボを並列に取り付ける部品を作っている所。
肩は2552、股関節は4034を使うつもりだけど、並列にしたら太くなり過ぎかな?
実験用ロボット
実験用ロボットを作っている。
股関節の干渉駆動する機構でロールとピッチの動きが出来れば台座を傾けてロールがヨーになってピッチがロールになる。
組み立て易い様にサーボを並列に取り付ける部品を作っている所。
肩は2552、股関節は4034を使うつもりだけど、並列にしたら太くなり過ぎかな?
2019年4月20日土曜日
実験用ロボット
実験用ロボットを作っている。
股関節の干渉駆動する機構を作って見た。
ロールとピッチの動きは出来るけどヨーの動きは出来ない。
4サーボ機構の様にサーボを並列に並べて見よう。
起動出来なくなったPCは元々の7200rpmのhddに戻して、ついでにメモリーをデュアルチャネルにしたので、それほど遅くはないかな。
2019年4月19日金曜日
実験用ロボット
実験用ロボットを作っている。
股関節ロールとヨー軸を干渉駆動する機構で、2本のシャフトの端はロッドエンドとピロボールを付けて、1本はユニバーサルジョイントを使ってみようと部品を用意してる所。
同じ機構を足首と肩に使う時にはサーボの配置を変える。
これでL字金具の数は減るので加工作業が楽になる。
PCで暇潰ししてたら突然エラーが起きて再起動出来なくなった。
BIOS画面で確認したらSSDの容量が0になってた。
しょうがないからHDDに交換する。
2019年4月18日木曜日
実験用ロボット
実験用ロボットを作っている。
股関節ピッチ軸サーボを板に取り付けた。
股関節ロールとヨー軸を干渉駆動する機構で軸受けに使うL字金具に穴開けした。
1つの穴開けに30分も掛かってしまうので他の作業は出来なかった。
股関節と足首と肩に使うので、あと15個穴開けしないといけない。
L字金具の在庫が足りないな。
ロッドエンドの在庫も足りない。
2019年4月17日水曜日
実験用ロボット
実験用ロボットを作っている。
腰関節の底板を接着した。
サーボ側面の板を追加した。
股関節ピッチ軸サーボを取り付ける板にアルミブラケットを付けて見た。
胴体の幅と奥行きがほぼ同じなのが気になる。
2019年4月16日火曜日
実験用ロボット
実験用ロボットを作っている。
腰関節の底板を接着するために部品を取り付けた。
サーボの前後だけでなく側面も囲む様にする。
股関節ピッチ軸サーボはアルミブラケットを付けて天板にネジ留めするつもり。
股関節ピッチ軸サーボの底面も囲って股間の形にするつもり。
股関節と腰関節はネジで繋げるつもり。
2019年4月15日月曜日
実験用ロボット
実験用ロボットを作っている。
新しい機体の全体図を描いた。
股関節は実現出来るか分からない。
足首のユニバーサルジョイント部分を変えたい。
爪先可動もやりたい。
色々未知な所が有るけど、描いた通りに出来たら良いな。
まずは腰と股関節ピッチ軸サーボを繋ぐ所から始めよう。
2019年4月14日日曜日
実験用ロボット
実験用ロボットを作っている。
干渉駆動の股関節の図をちょっと直した。
ピッチ軸サーボを胴体側に収めるので90機体の様にピッチ軸サーボがはみ出す形にはならない。
胴体の縦横比率を考えると胴体の長さは変えない方が良いと言う結論になってしまう。
胴体を短くすると子供っぽくなるので避けたい。
全体図を描いて見ようとしたけど失敗した。
2019年4月13日土曜日
実験用ロボット
実験用ロボットを作っている。
残ってた片持ちサーボアームの穴開けを終わらせた。
干渉駆動の股関節の図を描いて見た。
ピッチ軸サーボを胴体側に収めるのが良さそうに思えた。
腰関節のサーボを横置きにしないと駄目だな。
胴体の縦横比率を考えて妥当かな?
2019年4月12日金曜日
実験用ロボット
実験用ロボットを作っている。
今までの機体では股関節の機構が大きくて、腰から股下までが間延びした感じだった。
股関節のロール軸とヨー軸を干渉駆動にして、ピッチ軸サーボのサーボホーンを動かす様にすれば、高さが低くなるしピッチ軸サーボのはみだしも少くなるんじゃないかと考えた。
それなら腰関節の下サーボを横置きにしないといけない様に思うけど、それは後にする。
干渉駆動で動かすピッチ軸のシャフトは、レインボープロダクツのユニバーサルジョイントを使って繋いでみよう。
片持ちサーボアームが足りないので、両持ちサーボアームを加工して作っている所。
2019年4月11日木曜日
実験用ロボット
実験用ロボットを作っている。
腰関節を股関節に繋げると、どのくらいの大きさになるのか図を描いて見た。
今の機体が80cmを目標にしてたので、ほぼ同じ大きさになる。
股関節ヨー軸を取り付ける幅を狭くして、股関節ロール軸の可動範囲を大きくしたい。
胴体を細く、脚は太くする感じ。
2019年4月10日水曜日
実験用ロボット
実験用ロボットを作っている。
組み立てて、前後左右上下とヨー軸旋回出来る事を確認した。
サーボの取り付け方を横から縦にして、前から見た時は細く見える様になった。
もう少し動きを調整して、肩や股関節に繋げて行く。
2019年4月9日火曜日
実験用ロボット
実験用ロボットを作っている。
上サーボの天板を接着した。
余計な所は後で切り取る。
上サーボを上下逆に取り付け出来る様に軸受け位置とシャフトの長さを調整した。
可動範囲は狭くなりそう。
前に傾ける角度は大きくしたいけど後ろに傾ける角度は小さくて良いと思う。
ヨー軸の動きは良く分からない。
2019年4月8日月曜日
実験用ロボット
実験用ロボットを作っている。
上サーボの天板を取り付ける部品を作った。
仮組みして動かそうとしたら接着剤が固まってなくて接着し直した。
上サーボと下サーボの間が無駄に思えるので出来れば上サーボを上下逆に取り付けて隙間を埋めたい。
core i7-8550uのノートpcはバッテリーを取り付けなくても動ける。
底板を外して見たらhddとメモリが増設出来る事が分かった。
dvd再生ソフトが入ってたけどヘッドホンを繋ぐとノイズが聞こえる。
キーボードの感触が良くない。
悪い所は幾つか有るけどまあ良いか。
2019年4月7日日曜日
実験用ロボット
実験用ロボットを作っている。
上サーボの底板を用意して、サーボ取り付け部品を接着した。
上サーボの天板も作ろう。
中古PCばかり揃えて性能が今一だったので、core i7-8550uのノートpcを手に入れた。
2019年4月6日土曜日
実験用ロボット
実験用ロボットを作っている。
上サーボからのシャフトの長さと軸受けの位置を調整した。
軸受けの向きを変えたいけど穴を開け過ぎたので作り直さないといけない。
下サーボからのシャフトの軸受けを上サーボの底板に取り付けたいのでプラ板で作って見よう。
2019年4月5日金曜日
実験用ロボット
実験用ロボットを作っている。
上サーボを縦にして向きを変えて見た。
この向きだとサーボの取り付けネジをちゃんと締められる。
上サーボからのシャフトの長さと軸受けの位置が問題。
シャフトが短いと可動範囲が狭くなる。
軸受けの位置が悪いと動けない。
2019年4月4日木曜日
実験用ロボット
実験用ロボットを作っている。
上サーボをアルミブラケットで繋げる角度を変えて組み直して見たけど、左右でシャフトの長さが違うと上手く動かせなかった。
上サーボを縦に取り付ける方法を試してる所。
サーボを斜めに取り付けるのでネジ留めが3箇所になってしまう。
幅は少し狭くなるけど奥行きはあまり変わらない。
2019年4月3日水曜日
実験用ロボット
実験用ロボットを作っている。
上サーボをアルミブラケットで繋いで見た。
角度と位置が変えられないのでサーボホーンの周りの余裕がなくてシャフトを動かせない。
プラ板の上下にサーボを取り付ける様な部品を作ろう。
下サーボのシャフトを、その部品に繋げる。
2019年4月2日火曜日
実験用ロボット
実験用ロボットを作っている。
以前作った縦置き用の台座を上下逆にしてサーボを取り付けた。
これで下部が細くなって股関節と繋げられる。
新しい機体の高さは80cmにするつもりなので股関節の左右間隔の8cmくらいに腰関節が収まれば良い。
次は上サーボを2段にして細く出来るか試す。
2019年4月1日月曜日
実験用ロボット
実験用ロボットを作っている。
ヨー軸を動かした時に前に傾かない様にシャフトを1点にまとめて、後ろ側のシャフトを短くして見た。
でも、ヨー軸を動かした時に前に傾かない様に出来なかった。
90機体の腰と比べると高さは低くなってるけど太さは変わらない。
股関節と繋げるには下サーボを縦置きに戻した方が良さそう。
と言う事で新しい機体を考えて見よう。
新しい投稿
前の投稿
ホーム
登録:
投稿 (Atom)
フォロワー
ブログ アーカイブ
►
2026
(170)
►
6月
(20)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(30)
►
2025
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(32)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2024
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(31)
►
2023
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2022
(364)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(29)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2021
(367)
►
12月
(31)
►
11月
(31)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(31)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2020
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(31)
▼
2019
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(30)
►
6月
(30)
►
5月
(31)
▼
4月
(31)
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
実験用ロボット
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2018
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2017
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2016
(356)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(29)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(20)
►
1月
(32)
►
2015
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2014
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2013
(365)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(31)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2012
(366)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(30)
►
8月
(32)
►
7月
(29)
►
6月
(30)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(30)
►
1月
(31)
►
2011
(360)
►
12月
(31)
►
11月
(30)
►
10月
(31)
►
9月
(28)
►
8月
(31)
►
7月
(31)
►
6月
(25)
►
5月
(31)
►
4月
(30)
►
3月
(31)
►
2月
(29)
►
1月
(32)
►
2010
(387)
►
12月
(34)
►
11月
(36)
►
10月
(33)
►
9月
(33)
►
8月
(36)
►
7月
(31)
►
6月
(30)
►
5月
(31)
►
4月
(33)
►
3月
(31)
►
2月
(28)
►
1月
(31)
►
2009
(219)
►
12月
(31)
►
11月
(31)
►
10月
(33)
►
9月
(31)
►
8月
(35)
►
7月
(50)
►
6月
(8)
自己紹介
ichiro
詳細プロフィールを表示