
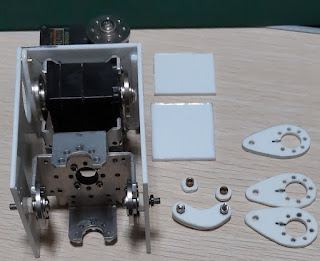
軸を直交させるサーボアームの方はどうしようかな。
2023年12月30日土曜日
2023年12月29日金曜日
2023年12月28日木曜日

2023年12月26日火曜日
2023年12月25日月曜日

2023年12月24日日曜日
2023年12月23日土曜日

2023年12月22日金曜日

2023年12月21日木曜日

2023年12月20日水曜日

2023年12月19日火曜日

2023年12月18日月曜日
2023年12月17日日曜日
2023年12月16日土曜日
2023年12月15日金曜日
2023年12月14日木曜日
2023年12月13日水曜日
2023年12月12日火曜日
2023年12月11日月曜日
2023年12月10日日曜日
2023年12月9日土曜日
2023年12月8日金曜日
2023年12月7日木曜日
2023年12月6日水曜日
2023年12月5日火曜日
2023年12月4日月曜日
2023年12月2日土曜日
2023年12月1日金曜日
2023年11月30日木曜日
2023年11月28日火曜日
2023年11月27日月曜日
2023年11月26日日曜日
2023年11月25日土曜日
2023年11月24日金曜日
2023年11月23日木曜日
2023年11月22日水曜日
2023年11月20日月曜日
2023年11月19日日曜日
2023年11月17日金曜日
2023年11月16日木曜日
2023年11月15日水曜日
2023年11月10日金曜日
2023年11月9日木曜日
2023年11月5日日曜日
2023年11月4日土曜日
2023年11月2日木曜日
2023年11月1日水曜日
2023年10月31日火曜日
2023年10月30日月曜日
2023年10月29日日曜日
2023年10月27日金曜日
2023年10月26日木曜日

2023年10月25日水曜日
2023年10月23日月曜日
2023年10月20日金曜日
2023年10月16日月曜日
2023年10月15日日曜日
2023年10月12日木曜日
2023年10月10日火曜日
2023年10月9日月曜日
2023年10月8日日曜日
2023年10月7日土曜日

2023年10月6日金曜日
2023年10月5日木曜日
2023年10月4日水曜日
2023年10月3日火曜日

2023年10月2日月曜日

2023年10月1日日曜日
2023年9月30日土曜日
2023年9月29日金曜日
2023年9月28日木曜日
2023年9月27日水曜日
2023年9月26日火曜日
2023年9月25日月曜日
2023年9月24日日曜日
2023年9月23日土曜日
2023年9月21日木曜日
2023年9月20日水曜日
2023年9月19日火曜日
2023年9月18日月曜日
2023年9月16日土曜日
2023年9月15日金曜日
2023年9月13日水曜日
2023年9月12日火曜日
2023年9月11日月曜日
2023年9月9日土曜日

2023年9月6日水曜日
2023年9月5日火曜日
2023年9月4日月曜日
2023年9月3日日曜日
2023年9月2日土曜日
2023年9月1日金曜日
2023年8月31日木曜日
2023年8月30日水曜日
2023年8月29日火曜日
2023年8月27日日曜日
2023年8月26日土曜日
2023年8月25日金曜日
2023年8月24日木曜日
2023年8月23日水曜日
2023年8月22日火曜日
2023年8月21日月曜日
2023年8月20日日曜日
2023年8月19日土曜日
2023年8月18日金曜日
2023年8月17日木曜日

2023年8月14日月曜日
2023年8月13日日曜日
2023年8月12日土曜日
2023年8月10日木曜日
2023年8月7日月曜日
2023年8月6日日曜日
2023年8月2日水曜日

2023年8月1日火曜日
2023年7月31日月曜日
2023年7月26日水曜日
2023年7月25日火曜日
2023年7月24日月曜日

2023年7月23日日曜日

2023年7月22日土曜日
2023年7月21日金曜日
2023年7月20日木曜日

2023年7月19日水曜日
2023年7月18日火曜日
2023年7月16日日曜日
2023年7月13日木曜日
2023年7月11日火曜日
2023年7月10日月曜日

2023年7月6日木曜日
2023年7月5日水曜日
2023年7月4日火曜日
2023年7月2日日曜日
2023年6月30日金曜日
2023年6月29日木曜日
2023年6月28日水曜日
2023年6月27日火曜日
2023年6月26日月曜日
2023年6月24日土曜日
2023年6月22日木曜日
2023年6月19日月曜日
2023年6月18日日曜日
2023年6月17日土曜日
2023年6月16日金曜日
2023年6月14日水曜日
2023年6月13日火曜日
2023年6月12日月曜日
2023年6月11日日曜日

2023年6月10日土曜日
2023年6月9日金曜日
2023年6月8日木曜日
2023年6月7日水曜日
2023年6月6日火曜日
2023年6月5日月曜日

2023年6月3日土曜日
2023年5月29日月曜日
2023年5月28日日曜日
2023年5月25日木曜日

2023年5月24日水曜日
2023年5月23日火曜日
2023年5月22日月曜日

2023年5月21日日曜日
2023年5月19日金曜日
2023年5月18日木曜日
2023年5月17日水曜日
2023年5月16日火曜日
2023年5月15日月曜日
2023年5月14日日曜日
2023年5月13日土曜日
2023年5月12日金曜日
2023年5月11日木曜日
2023年5月9日火曜日

2023年5月8日月曜日



2023年5月6日土曜日

2023年5月5日金曜日

2023年5月4日木曜日


2023年5月2日火曜日

2023年4月30日日曜日
2023年4月29日土曜日
2023年4月26日水曜日
2023年4月25日火曜日
2023年4月24日月曜日



2023年4月22日土曜日

2023年4月20日木曜日




2023年4月16日日曜日

2023年4月14日金曜日

2023年4月13日木曜日

2023年4月12日水曜日


2023年4月10日月曜日

2023年4月9日日曜日

2023年4月8日土曜日


登録:
投稿 (Atom)